import gfxprim.core as core import gfxprim.filters as filters # Inverts image in-place img.filters.Invert(img, callback=None) # Returns newly allocated inverted image res = img.filters.InvertAlloc(callback=None)
Python Filters module
The python binding maps mostly to the C API with the gp_filter_ prefix stripped.
The filter functions could be called directly as filters.Foo(img, ..) or
from submodule as img.filters.Foo(..). Note that in the second case the
image is passed automatically as a first parameter.
If filter is aborted from a callback OSError with errno set to ECANCELED is raised, see progress callback for more information.
Point Filters
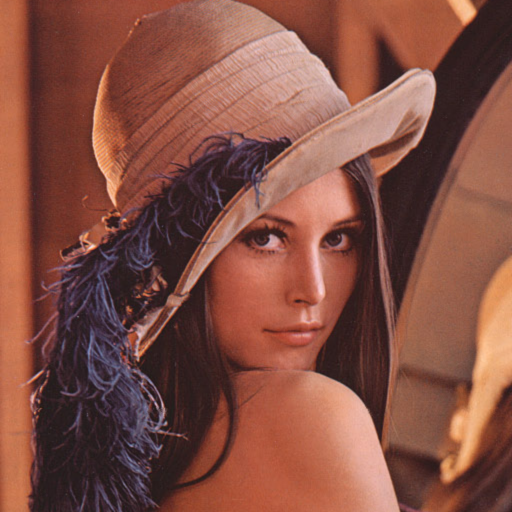
Invert
The pixel channel values are counted as chann_max - val.
Original Image; Inverted

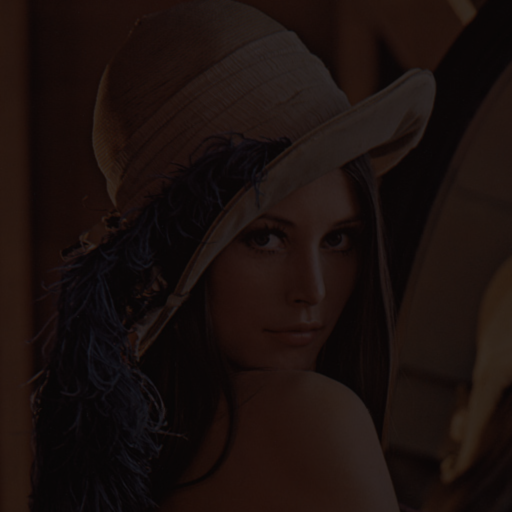
Brightness
import gfxprim.core as core import gfxprim.filters as filters # Increses images brightness in-place by channel_max * 0.2 img.filters.Brightness(img, 0.2, callback=None) # Returns image with brightness decreased by channel_max * -0.5 res = img.filters.BrightnessAlloc(img, -0.5, callback=None)
The pixel channel values are counted as val + chann_max * p.
Original Image; Brightness p=-0.5, p=-0.2, p=0.2, p=0.5




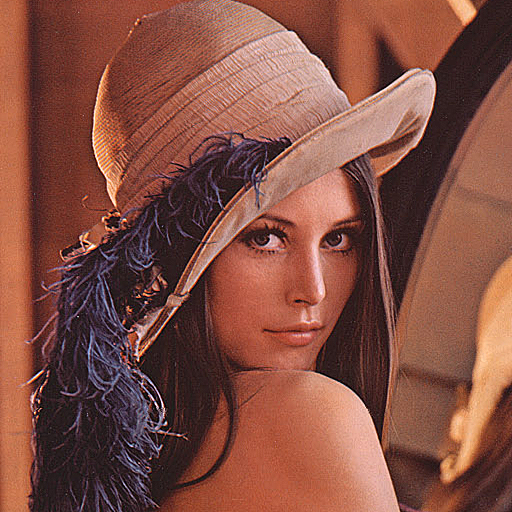
Contrast
import gfxprim.core as core import gfxprim.filters as filters # Increses images contrast by 1.2 img.filters.Contrast(img, 1.2, callback=None) # Returns image with contrast decreased by 0.2 res = img.filters.ContrastAlloc(img, 0.2, callback=None)
The pixel channel values are counted as val * p.
Original Image; Contrast p=0.2, p=0.5, p=1.5, p=2, p=3




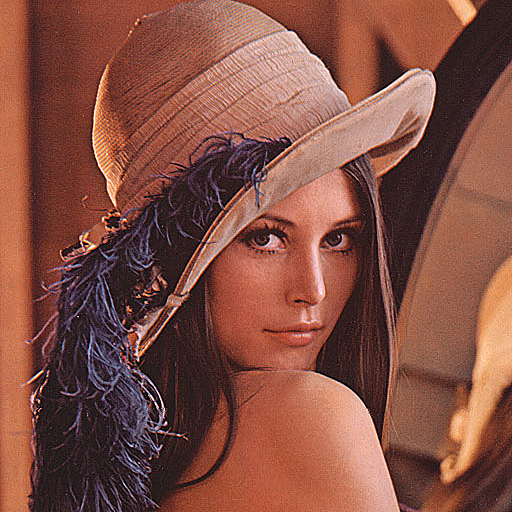
BrightnessContrast
import gfxprim.core as core import gfxprim.filters as filters # Increses images contrast by 1.2 decreases brightness by -0.2 img.filters.BrightnessContrast(img, -0.2, 1.2, callback=None) # Returns image with contrast decreased by 0.2 brightness increased by .5 res = img.filters.BrightnessContrastAlloc(img, 0.5, 0.2, callback=None)
The pixel channel values are counted as val * c + chann_max * b.
Original Image; BrightnessContrast b=-0.2 c=0.8, b=-0.5 c=2, b=0.2 c=0.8, b=0.2 c=1.5




Posterize
import gfxprim.core as core import gfxprim.filters as filters # Posterizes image using 2 steps img.filters.Posterize(img, 2, callback=None) # Returns image posterized into 4 levels res = img.filters.PosterizeAlloc(img, 4, callback=None)
The pixel channel values are quantized into number of levels.
Original Image; Posterize s=2, s=3, s=4, s=5, s=6





Rotations and Mirroring
MirrorH
import gfxprim.core as core import gfxprim.filters as filters # Mirrors in-place image horizontally img.filters.MirrorH(img, callback=None) # Mirrors image horizontally res = img.filters.MirrorHAlloc(callback=None)
Mirrors image horizontally.
Original Image; Mirrored Horizontally

MirrorV
import gfxprim.core as core import gfxprim.filters as filters # Mirrors in-place image vertically img.filters.MirrorV(img, callback=None) # Mirrors image vertically res = img.filters.MirrorVAlloc(callback=None)
Mirrors image vertically.
Original Image; Mirrored Vertically

Rotate90
import gfxprim.core as core import gfxprim.filters as filters # Rotate in-place by 90 degrees img.filters.Rotate90(img, callback=None) # Rotate by 90 degrees res = img.filters.Rotate90Alloc(callback=None)
Rotate image by 90 degrees clockwise.
Original Image; Rotated by 90 degrees

Rotate180
import gfxprim.core as core import gfxprim.filters as filters # Rotate in-place by 180 degrees img.filters.Rotate180(img, callback=None) # Rotate by 180 degrees res = img.filters.Rotate180Alloc(callback=None)
Rotate image by 180 degrees clockwise.
Original Image; Rotated by 180 degrees

Rotate270
import gfxprim.core as core import gfxprim.filters as filters # Rotate in-place by 270 degrees img.filters.Rotate270(img, callback=None) # Rotate by 270 degrees res = img.filters.Rotate270Alloc(callback=None)
Rotate image by 270 degrees clockwise.
Original Image; Rotated by 270 degrees

Gaussian Additive Noise
import gfxprim.core as core import gfxprim.filters as filters # Adds Gaussian noise in-place with sigma=0.2 mu=0.0 filters.GaussianNoiseAdd(img, img, 0.2, 0.0, callback=None) # Returns newly allocated noisy image res = img.filters.GaussianNoiseAddAlloc(0.2, 0.0, callback=None)
Gaussian additive noise filter adds gaussian distributed noise to an image with a defined sigma and mu. Both sigma and mu weights mapped to [0,1] interval.
Original Image; Gaussian Additive Noise s=0.03 m=0, s=0.05 m=0, s=0.05 m=-0.1, s=0.05 m=0.1, s=0.07 m=0.0





Laplacian Edge Sharpening
import gfxprim.core as core import gfxprim.filters as filters # Does in-place Edge Sharpening filters.EdgeSharpening(img, img, 0.2, callback=None) # Returns newly allocated sharpened image res = img.filters.EdgeSharpening(0.2, callback=None)
Laplace based edge sharpening filter, subtracts weighted second derivative from the original image.
The float paramerter is multiplicative weight applied on the second derivative. Reasonable results are when the parameter is between 0.1 and 1.

Original Image; Edge Sharpening w=0.1, w=0.3, w=0.5, w=0.8, w=1.0



Convolution
import gfxprim.core as core import gfxprim.filters as filters # Does in-place bilinear convolution with 3x3 box blur kernel filters.Convolution(img, img, [[1, 1, 1], [1, 1, 1], [1, 1, 1]], 9, callback=None) # Does bilinear convolution with 3x3 box blur kernel. # # The image data from source starting at 20,20 of a size 250x250 are # stored at 100,100 in res. filters.ConvolutionEx(img, 20, 20, 250, 250, res, 100, 100, [[1, 1, 1], [1, 1, 1], [1, 1, 1]], 9, callback=None) # Returns newly allocated image convolution with Laplacian 3x3 kernel res = img.filters.ConvolutionAlloc([[ 0.00, -0.25, 0.00], [-0.25, 1.00, -0.25], [ 0.00, -0.25, 0.00]], 1, callback=None) # Returns newly allocated subimage convolution with Sobel 3x3 kernel res = img.filters.ConvolutionExAlloc(50, 50, 100, 100, [[ 1, 0, -1], [ 2, 0, -2], [ 1, 0, -1]], 1, callback=None)
Bilinear convolution. The kernel is specified as two dimensional array of numbers, the second number is divisor of the kernel weighed sum of pixels.
The pixel value is computed as:

Which is the same as:

|
|
The number of kernel rows and columns is expected to be odd number. |
|
|
See convolution example. |
Original Image; Convolution: 3x3 Box Blur, 5x5 Box Blur, 3x3 Laplacian, 3x3 Sobel, 3x3 Roberts
(1,1,1)(1,1,1)<em>9.png)
(1,1,1,1,1)(1,1,1,1,1)(1,1,1,1,1)(1,1,1,1,1)<em>25.png)
(-1,4,-1)(0,-1,0)<em>1.png)
(2,0,-2)(1,0,-1)<em>1.png)
(1,-1,0)(0,0,0)_1.png)
Blurs
import gfxprim.core as core import gfxprim.filters as filters # Does in-place Gaussian blur, the image is modified in-place filters.GaussianBlur(img, img, x_sigma, y_sigma, callback=None) # Returns newly alocated blurred image res = img.filters.GaussianBlur(x_sigma, y_sigma, callback=None)
Gaussian blur (low pass) filters implemented as bilinear separable convolution.
|
|
See blur example. |
Original Image; Gaussian Blur xsig=2 ysig=2, xsig=0 ysig=4, xsig=4 ysig=0, xsig=4 ysig=4, xsig=10 ysig=10





Ditherings
import gfxprim.core as core import gfxprim.filters as filters # Returns img dithered to 1-bit Grayscale as a new image res = img.filters.FloydSteinbergAlloc(core.C.PIXEL_G1, callback=None) # Returns img dithered to 1-bit Grayscale as a new image res = img.filters.HilbertPeanoAlloc(core.C.PIXEL_G1, callback=None)
Returns new 1-bit Grayscale image which is result from Floyd-Steinberg, Hilbert-Peano dithering.
The first parameter is pixel type, the second is progress callback.
For more information and example images see C dithering documentation.
|
|
See dithering example. |
Original Image; Simple Conversion: RGB332, G8, G4, G2, G1




Original Image; Floyd Steinberg Dithering: RGB332, G8, G4, G2, G1



Original Image; Hilbert Peano Dithering: RGB332, G8, G4, G2, G1




Median
import gfxprim.core as core import gfxprim.filters as filters # Returns result of median filter over a rectangle of a side 2 * 3 + 1 pixels res = img.filters.MedianAlloc(3, 3, callback=None) # Applies median filter in-place img.filters.Median(3, 3, callback=None)
Constant time median filter (the computational complexity is independent of radius size).
The parameters are radius values for x and y. The algorithm uses x
respectively y pixel neighbors from each side so the result is median of
rectangle of 2 * x + 1 x 2 * y + 1 pixels.
Original Image; Median xr=3 yr=3, xr=5 yr=5, xr=7 yr=7, xr=9 yr=9, xr=12 yr=12





Resize
import gfxprim.core as core import gfxprim.filters as filters # Nearest neighbour resize, fastest but lowest quality res = img.ResizeNNAlloc(100, 100, callback=None) # Fast and good quality with low pass on downscaling res = img.ResizeLinearLFIntAlloc(100, 100, callback=None) # Cubic interpolation, needs low pass (blur) applied before downscaling res = img.ResizeCubicIntAlloc(100, 100, callback=None) # All of the above, TYPE is numeric enum res = img.ResizeAlloc(100, 100, TYPE, callback=None)
Functions to resize (resample) image.
|
|
See resize example. |